
AutoDrive Challenge II



The AutoDrive II Challenge is a GM and SAE sponsored event in which universities receive a stock Chevy EUV Bolt and make it autonomous over 5 years. This edition of the challenge began in 2021 and will be ending in June 2026. Scored challenges progressively get harder as each year passes with topics including base-level object detection and vehicle control, while later spanning to non-gps-based localization and multi-stop trips. Teams then meet in June of each year to compete at University of Michigan's test track, M-City, to compete in the year's given challenges. To see more about the AutoDrive Challenge, please visit the link below.
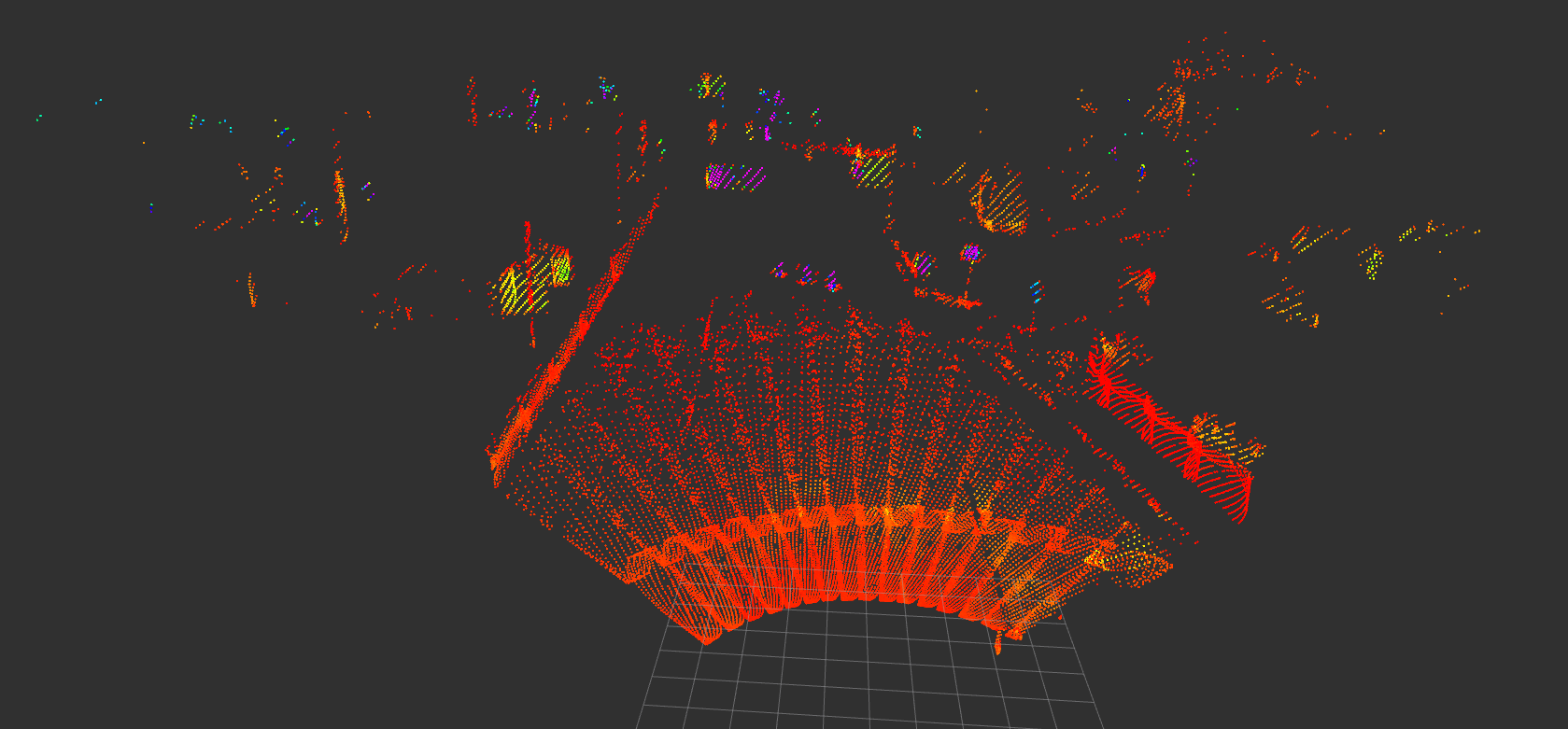
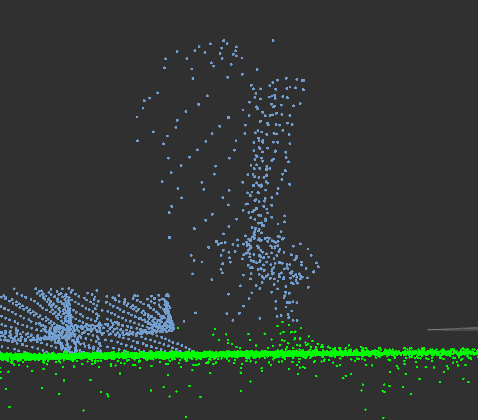

In my time on AutoDrive, most of my work has been within the perception team and any of the tasks that we had set. I originally started on the project in my sophomore year, and barely knew how to code in C++ let along even knowing how to use ROS, LiDAR, or remotely understand what I was getting into. I began with basic euclidean clustering and plane ground filtering as a starting ground. Although I'm not fully proud of the code me and my fellow members put together, we were able to at least remove the ground plane and output some bounding boxes of objects in our surround environment. In addition to my work within the lidar side of our perception team, I also did a fair share of figuring out how to integrate our yolov5 camera detection and classification into our ros stack. This involved converting our neural network into on onnx file and then integrating it into a C++ environment for our vehicle to run. Additional tasks during this year also included some work on the sensor fusion section for lidar and camera object associating.
In my second year, I originally started out on that process but got pulled into working for the Mapping and Planning Team due to a friend being swamped with writting two subsystems for the vehicle on their own. You'll be able to read about my work on that side in the Mapping and Planning section below.
As for my third and final year, I'm the one writing a whole subsystem on my own... yippee. Which is actually really cool but definitely a huge task. More specifics will be added in my projects section under the name The Diviner, as that is my holy grail of AutoDrive and my biggest accomplishment up to this point. It's not the best code but its definitely better than what I used to do.
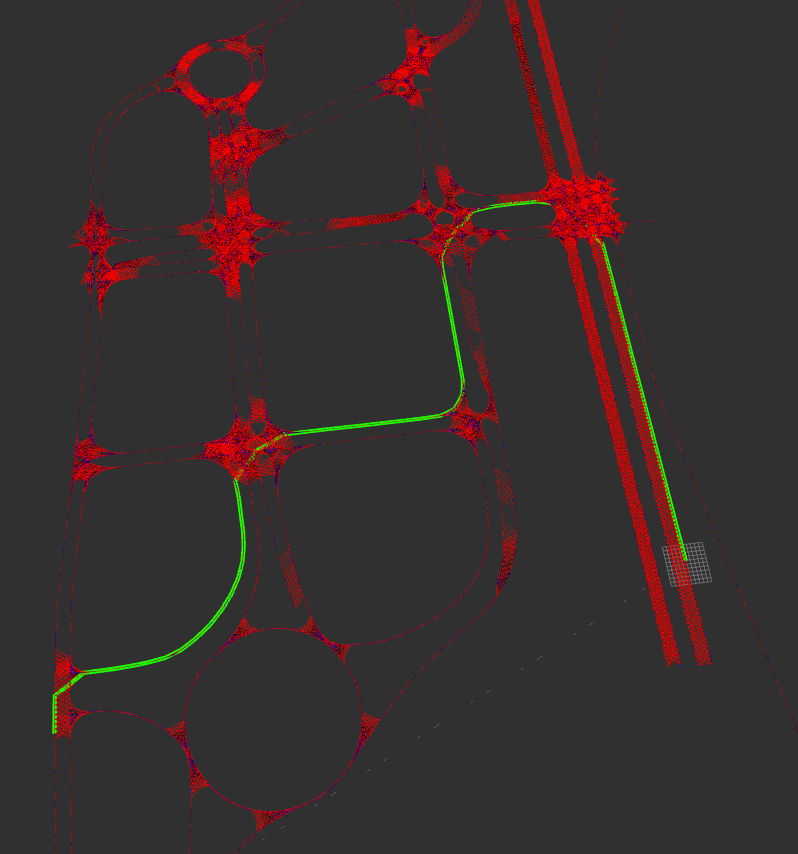
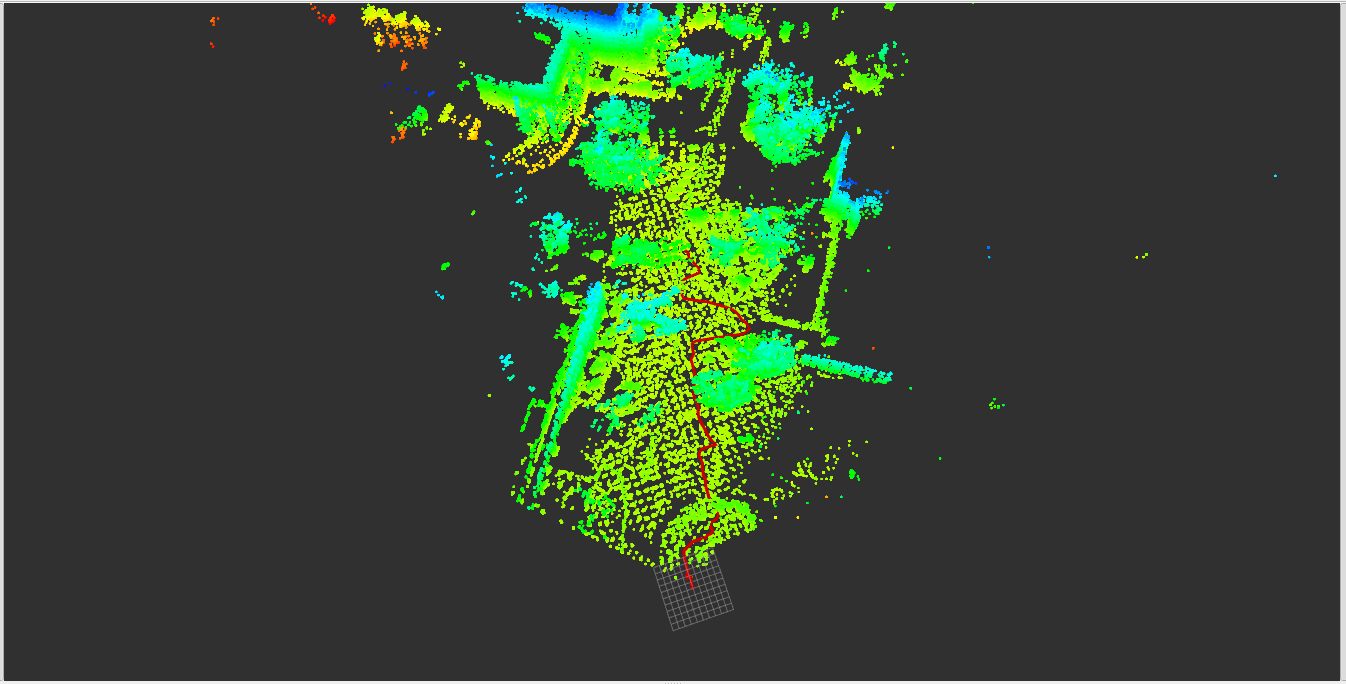
As stated in my perception section, I was pulled into the Mapping and Planning team to help out a friend who was swamped with trying to write the path planner and behavioral subsystems. During this time, I worked to help implement our D* path planner which you can see in use in the image to the left. Our aim was just basic level path planning and navigational abilities with standard point A to point B travel.
This is probably my biggest accomplishment on the AutoDrive team.